![[Photo of the Authors]](../../common/images/KatjaAndGuido.jpg)
Katja and Guido Socher
<katja/at/linuxfocus.org, guido/at/linuxfocus.org>
About the authors:
Katja LinuxFocus'un Alman editïŋ―rïŋ―dïŋ―r. Kendisi Tux, Bilgisayar Tabanlïŋ― ïŋ―izim, film ve fotoïŋ―rafïŋ―ïŋ―lïŋ―k ve denizi sever.
Ana sayfasina buradan ulaïŋ―abilirsiniz. Guido ïŋ―ok uzun zamandan beri Linux severdir ve Linux'un kedisine seïŋ―im ïŋ―ansïŋ― ve ïŋ―zgïŋ―rlïŋ―k verdiïŋ―ini dïŋ―ïŋ―ïŋ―nïŋ―yor.
Linux ile gereksinimlerinize gïŋ―re ïŋ―ïŋ―zïŋ―mler ïŋ―retip geliïŋ―tirebilirsiniz.
Tïŋ―rkïŋ―e'ye ïŋ―eviri:
M. Muti Gïŋ―zel <gozelm/at/be.itu.edu.tr>
ïŋ―ïŋ―erik:
|
Otomatik ïŋ―ïŋ―ïŋ―k izleyici robot yapmak
![[Illustration]](../../common/images/article297/robot.jpg)
ïŋ―zet:
Bu yazïŋ―da bir mikro kontrol birimi ile en parlak noktaya yïŋ―nelerek ilerleyen otomatik bir robotun nasïŋ―l yapïŋ―lacaïŋ―ïŋ―nïŋ― anlatacaïŋ―ïŋ―z.
_________________ _________________ _________________
|
Giriïŋ―
ïŋ―ki yïŋ―l ïŋ―nce LinuxFocus'da Linux-kontrollïŋ― yïŋ―rïŋ―yen robot'u anlattïŋ―k. ïŋ―ki ayaïŋ―ïŋ― ïŋ―zerinde yïŋ―rïŋ―yebilmesi ve alïŋ―ïŋ―ïŋ―lagelmiïŋ― motorlarïŋ―nïŋ―n
bulunmamasïŋ― aïŋ―ïŋ―sïŋ―ndan tasarïŋ―mda ïŋ―ok ïŋ―zel bir yapïŋ―ya sahipti. Bu, bu robotun ïŋ―ok ilginïŋ― olan bir yanïŋ―ydïŋ―; bununla birlikte robot
ïŋ―ok yavaïŋ―tïŋ―, ïŋ―ok fazla akïŋ―ma gereksinim duyuyordu ve yapïŋ―mïŋ― iïŋ―in ïŋ―ok fazla ïŋ―zel parïŋ―a ve hïŋ―ner gerektiriyordu.
Yeni robotumuzun tasarïŋ―mïŋ― son derece farklïŋ―. Ucuz ve her yerde bulabileceïŋ―imiz tïŋ―rden parïŋ―alarla yapabileceksiniz.
Bir AVR mikro kontrol birimi ile kontrol edilebilen bir otomatik robottur. Otomatik bir ïŋ―ekilde (kiïŋ―i kontrolïŋ― olmadan) odadaki
en aydïŋ―nlïŋ―k tarafa yïŋ―nelerek ilerleyecek ïŋ―ekilde programladïŋ―k.
Mekanik Kïŋ―sïŋ―m
![[conrad motor]](../../common/images/article297/297_conrad.jpg)
Conrad'tan kïŋ―ïŋ―ïŋ―k ïŋ―arklïŋ― bir motor.
|
![[servo motor]](../../common/images/article297/297_servo.jpg)
Motor olarak ïŋ―alïŋ―ïŋ―masïŋ― iïŋ―in dïŋ―zenlenmiïŋ― bir Servo. Bu belki en iyi ïŋ―ïŋ―zïŋ―mdïŋ―r ama bu fikir robotumuzu bitirdikten sonra
aklïŋ―mïŋ―za geldi.
|
Robotun iki baïŋ―ïŋ―msïŋ―z motor tarafïŋ―ndan yïŋ―rïŋ―tïŋ―len iki tekerleïŋ―i var. ïŋ―ïŋ―ïŋ―ncïŋ― tekerlek ise bir pinpon topudur. Bu, robotun parlak
noktada dïŋ―nmesini saïŋ―layacaktïŋ―r. Tekerlek iïŋ―in oyuncaktan sïŋ―ktïŋ―ïŋ―ïŋ―mïŋ―z lastik tekerlekler kullandïŋ―k ama siz buna mecbur
deïŋ―ilsiniz. Etrafïŋ―na bir lastik bant sarïŋ―lmïŋ―ïŋ― bir reïŋ―el kavanozunun kapaïŋ―ïŋ― da iyi bir tekerlek olabilir.
Otomatik bir robotun pillerle ïŋ―alïŋ―ïŋ―masïŋ― oldukïŋ―a ïŋ―nemlidir. Mikro kontrol birimi 4.5V ile ïŋ―alïŋ―ïŋ―tïŋ―ïŋ―ïŋ―ndan motorlar da 3-4.5V ile
ïŋ―alïŋ―ïŋ―malïŋ―dïŋ―r. Daha fazla akïŋ―ma gerek olmamalïŋ―dïŋ―r, aksi durumda piller ve kontrol devresi aïŋ―ïŋ―rïŋ― bïŋ―yïŋ―k ve aïŋ―ïŋ―r olacaktïŋ―r.
Bu tasarïŋ―m iïŋ―in 1293d olarak adlandïŋ―rïŋ―lan bir entegre motor sïŋ―rïŋ―ïŋ― ïŋ―ipi kullandïŋ―k. 1293d motor sïŋ―rïŋ―ïŋ― ïŋ―ipi 0.5A'e kadar olan
yïŋ―kleri taïŋ―ïŋ―yabilir. Bu nedenle motorlar, en kïŋ―tïŋ― koïŋ―ullarda, 0.5A'in altïŋ―nda ïŋ―alïŋ―ïŋ―malïŋ―dïŋ―r.
Conrad'dan (www.conrad.de, part number: 242802) elde ettiïŋ―imiz ïŋ―anzïŋ―man kutulu 2 kïŋ―ïŋ―ïŋ―k motor kullandïŋ―k ama siz
baïŋ―ka bir tïŋ―r ïŋ―anzïŋ―man kutulu motor da kullanabilirsiniz. Aslïŋ―nda simdi, kïŋ―ïŋ―ïŋ―k botlarïŋ―n, arabalarïŋ―n ve uïŋ―aklarïŋ―n uzaktan
kumandasïŋ―nda kullanïŋ―lan Servo Motorlarïŋ―n kullanmamïŋ―zïŋ―n en iyi ïŋ―ïŋ―zïŋ―m olacaïŋ―ïŋ―nïŋ― dïŋ―ïŋ―ïŋ―nïŋ―yoruz. Normalde bu Servo Motorlar
sadece bir yïŋ―nde dïŋ―nerler ama siz ïŋ―anzïŋ―man kutusunu aïŋ―abilir, durdurucuyu alabilir, potansiyometreyi ve elektronik birimi
ïŋ―ïŋ―karabilirisiniz. Kolay bulunabilir ufak ve gïŋ―ïŋ―lïŋ― motorlardïŋ―r.
![[motor on wooden board 1]](../../common/images/article297/297_mecanics1.jpg)
Robotu yapmak iïŋ―in motorlarïŋ― bir tahtanïŋ―n (12cm x 9cm) alt tarafïŋ―na, yïŋ―kïŋ―n bïŋ―yïŋ―k kïŋ―smïŋ― iki dingil ïŋ―zerinde taïŋ―ïŋ―nacak ïŋ―ekilde,
ortaya yakïŋ―n yerleïŋ―tiriniz. ïŋ―ïŋ―ïŋ―ncïŋ― tekerlek olan pinpon topu, yuvasïŋ―nda rahat bir ïŋ―ekilde dïŋ―nebilmesinin saïŋ―lanmasïŋ― iïŋ―in,
yïŋ―kïŋ―n kïŋ―ïŋ―ïŋ―k bir kïŋ―smïŋ―nïŋ― taïŋ―ïŋ―malïŋ―dïŋ―r.
![[motor on wooden board 1]](../../common/images/article297/297_mecanics2.jpg)
Pinpon topunun yuvasïŋ― doïŋ―ru bïŋ―yïŋ―klïŋ―ïŋ―e sahip kïŋ―ïŋ―ïŋ―k bir plastik ïŋ―ise kapaïŋ―ïŋ― olabilir.
![[pill box]](../../common/images/article297/297_mecanics3.jpg)
Robotun hareketi iïŋ―in 3 tane AAA pil kullandïŋ―k. Pil tutucularïŋ―nïŋ― aïŋ―aïŋ―ïŋ―da gïŋ―sterildiïŋ―i gibi yerleïŋ―tiriniz.
Piller oldukïŋ―a aïŋ―ïŋ―rdïŋ―r bu yïŋ―zden yerleïŋ―tirilmelerinde yïŋ―kïŋ―n ïŋ―oïŋ―unun tekerlekler ïŋ―zerine ve yalnïŋ―zca azïŋ―nïŋ―n pinpon topuna
gelmesine dikkat edilmelidir. Bir aïŋ―-kapa dïŋ―ïŋ―mesini kenarda istediïŋ―iniz yere yerleïŋ―tirebilirsiniz.
![[position of the batteries]](../../common/images/article297/batteries.gif)
Algïŋ―layïŋ―cïŋ―lar
Robotumuza iki tip algïŋ―layïŋ―cïŋ― verdik:
- dokunma algïŋ―layïŋ―cïŋ―larïŋ―: bu yolla robot bir yere ïŋ―arpïŋ―p ïŋ―arpmadïŋ―ïŋ―ïŋ―nïŋ― anlar
- ïŋ―ïŋ―ïŋ―k algïŋ―layïŋ―cïŋ―larïŋ―: robotun odadaki en aydïŋ―nlïŋ―k noktayïŋ― bulmasïŋ― iïŋ―in
Dokunma algïŋ―layïŋ―cïŋ―larïŋ― ïŋ―elik tellerden yapïŋ―lmïŋ―ïŋ― basit aïŋ―kïŋ―lardïŋ―r. ïŋ―elik telleri aïŋ―aïŋ―ïŋ―da gïŋ―sterildiïŋ―i gibi eïŋ―dik:
![[steel wire]](../../common/images/article297/steelwire.jpg)
Tahta plakanïŋ―n her kenarïŋ―nda bir vida ile tutturulmuïŋ― bïŋ―yle 4 algïŋ―layïŋ―cïŋ― vardïŋ―r.
Robot bir cisme dokunduïŋ―unda ïŋ―elik tel (2, sekle bakïŋ―nïŋ―z) tahta plaka (3) ïŋ―zerindeki ikinci tele dokunur ve bu ïŋ―elik tel ile tahta
ïŋ―zerinde bulunan tel arasïŋ―ndaki elektrik baïŋ―lantïŋ―sïŋ―nïŋ― kapatïŋ―r.
Pinpon topu yuvasïŋ―ndan ïŋ―ïŋ―ktïŋ―ïŋ―ïŋ―nda ïŋ―elik telin eïŋ―ilmemesi iïŋ―in tahta plaka altïŋ―na bir tahta parïŋ―asïŋ― (1) ekledik.
Bu parïŋ―a pinpon topu yuvasïŋ―nda iken yerden 5mm yïŋ―ksekte olmalïŋ―dïŋ―r.
ïŋ―elik telin ucu yerden 5-7mm yïŋ―ksekte olmalïŋ―.
![[touch sensors]](../../common/images/article297/touchsensor.jpg)
Iïŋ―ïŋ―k algïŋ―layïŋ―cïŋ―larïŋ― 3 foto direnïŋ―ten oluïŋ―uyor. Kaïŋ―ïŋ―t parïŋ―alarïŋ―nïŋ― foto direnïŋ―lerin arasïŋ―na aïŋ―aïŋ―ïŋ―da ïŋ―ekilde gïŋ―rïŋ―ldïŋ―ïŋ―ïŋ― gibi yerleïŋ―tirdik.
Bu kaïŋ―ïŋ―t parïŋ―alarïŋ― ïŋ―ïŋ―ïŋ―k yandan vurduïŋ―unda gïŋ―lge oluïŋ―turacaktïŋ―r. Sadece ïŋ―ïŋ―ïŋ―k tamamen tepeden vurduïŋ―unda, 3 algïŋ―layïŋ―cïŋ―nïŋ―n hepsi
ïŋ―zerinde eïŋ―it miktarda ïŋ―ïŋ―ïŋ―k saïŋ―layacaktïŋ―r. Robot 3 algïŋ―layïŋ―cïŋ― ïŋ―zerindeki deïŋ―erleri karïŋ―ïŋ―laïŋ―tïŋ―rarak hangi doïŋ―rultuda gideceïŋ―ine
karar verebilecektir.
Bu 3 foto direnci kïŋ―ïŋ―ïŋ―k bir deney tahtasïŋ― (ïŋ―zerinde ïŋ―ok sayïŋ―da delik bulunan plakalar) ïŋ―zerine yapïŋ―ïŋ―tïŋ―rïŋ―p sonra hepsini bir tek
vida ile robota ekleyebilirsiniz.
Algïŋ―layïŋ―cïŋ―larïŋ―n ve motorlarïŋ―n baskïŋ―lïŋ― devre plakasïŋ― ïŋ―zerine mikro kontrol birimi ile nasïŋ―l bileïŋ―tirileceïŋ―i aïŋ―aïŋ―ïŋ―da daha ayrïŋ―ntïŋ―lïŋ― olarak
anlatïŋ―lacaktïŋ―r. Mekanik parïŋ―alarïŋ― oluïŋ―turduïŋ―umuza gïŋ―re, simdi robotun beynini inceleyelim.
Devre
Robotumuzda beyin olarak bir AT90S4433 mikro kontrol birimi kullandïŋ―k fakat beyin motorlarïŋ― dïŋ―ndïŋ―recek kadar enerjiyi
doïŋ―rudan aktaramaz. ïŋ―ïŋ―te bu noktada L293D motor sïŋ―rïŋ―ïŋ― birimi devre girer. Bu ïŋ―ip 4 yïŋ―kselticili dijital ïŋ―ïŋ―kïŋ―ïŋ― kapïŋ―sïŋ―na ve
motorun sarïŋ―mlarïŋ―ndan kaynaklanabilecek yïŋ―ksek akïŋ―ma karïŋ―ïŋ― korumak iïŋ―in ekstra korumalïŋ― diyotlara sahiptir.
Bu ïŋ―ïŋ―kïŋ―ïŋ― kapïŋ―larïŋ―nïŋ―n ikisi bir motoru sïŋ―rmek iïŋ―in kullanïŋ―labilir. Bïŋ―ylelikle motorun saïŋ―a ve sola dïŋ―nmesi saïŋ―lanabilir.
Bir motoru 1. ve 2. diïŋ―erini de 3. ve 4. ïŋ―ïŋ―kïŋ―ïŋ― kapïŋ―larïŋ―nïŋ―n arasïŋ―na baïŋ―ladïŋ―k. Bu, ïŋ―ipin saïŋ―layïŋ―cïŋ― ayaklarïŋ―na deïŋ―iïŋ―ik sïŋ―reli etkiler
gïŋ―nderdiïŋ―imizde, ïŋ―ipin ayaklarïŋ―nïŋ―n motorlarïŋ―n hïŋ―zïŋ―nïŋ― kontrol etmek iïŋ―in kullanïŋ―lmasïŋ―nïŋ― saïŋ―lar.
Devrenin geri kalan tarafïŋ― ïŋ―ok basittir: Atmel AT90S4422 mikro kontrol birimini tekrar kullanïŋ―rïŋ―z.
Daha ïŋ―nceki LinuxFocus makalelerinden bu mikro kontrol birimini biliyorsunuz.
Analog giriïŋ―leri foto direnïŋ―ler ïŋ―zerindeki ïŋ―ïŋ―ïŋ―ïŋ―ïŋ― ïŋ―lïŋ―mek iïŋ―in kullanïŋ―labilir ve dokunma algïŋ―layïŋ―cïŋ―larïŋ―,
aïŋ―aïŋ―ïŋ―daki ïŋ―ekilde gïŋ―sterildiïŋ―i gibi, doïŋ―rudan dijital giriïŋ―lere baïŋ―lanabilir.
Mikro kontrol birimi hakkïŋ―nda daha fazla bilgiyi Guido'nun Mart 2002 yazïŋ―: GCC ile AVR Mikro Kontrol Biriminin Programlanmasïŋ―
makalesinde bulabilirsiniz.
Devre 4.5V ile ïŋ―alïŋ―ïŋ―ïŋ―r. ïŋ―ïŋ― AAA pili bu nedenle robotu ïŋ―alïŋ―ïŋ―tïŋ―rmak iïŋ―in yeterlidir.
Otomatik robotumuzun devresi artïŋ―k hazïŋ―r olacaktïŋ―r. Bununla birlikte yazïŋ―lïŋ―mda bir ïŋ―eyler doïŋ―ru gitmez ve robot beklendiïŋ―i
gibi ïŋ―alïŋ―ïŋ―maz ise ne yapacaksïŋ―nïŋ―z? Hiïŋ― bir ïŋ―ey gïŋ―remezsiniz. Foto direnïŋ―lerin deïŋ―erini bilmezsiniz, robot yazïŋ―lïŋ―mïŋ―nïŋ―n hangi
secimi yaptïŋ―ïŋ―ïŋ― hakkïŋ―nda bir fikir sahibi olmazsïŋ―nïŋ―z. Bize gereken ïŋ―ey robotun ne yaptïŋ―ïŋ―ïŋ―nïŋ― gïŋ―sterecek herhangi bir ekrandïŋ―r.
RS232 seri baïŋ―lantïŋ―sïŋ― bu is iïŋ―in uygunudur. Deïŋ―iïŋ―kenlerin deïŋ―erini okuyabilir ve hatta robotla iletiïŋ―im kurabiliriz.
Baïŋ―lantïŋ―yïŋ― sïŋ―rekli yapmak istemiyoruz ama robotun hatalarïŋ―nïŋ― ayïŋ―klamak iïŋ―in gerek duyuyoruz. Bu nedenle max232'yi ve RS232
baïŋ―lantïŋ―sïŋ― iïŋ―in gerekli olan diïŋ―er parïŋ―alarïŋ― baïŋ―ka bir plaka ïŋ―stïŋ―ne eklemek ve gerektiïŋ―inde baïŋ―layïŋ―p ïŋ―ïŋ―karmak daha akïŋ―llïŋ―ca
olacaktïŋ―r:
Tam Eagle devresi diyagramlarïŋ―, plakadaki yerleïŋ―im ve robot iïŋ―in gerekli yazïŋ―lïŋ―m bu makalenin sonundaki bïŋ―lïŋ―mden indirilebilir.
Burada plakadaki yerleïŋ―imi anlatmayacaïŋ―ïŋ―z. Devre plakasïŋ― piller arasïŋ―na yerleïŋ―ecek kadar kïŋ―ïŋ―ïŋ―ktïŋ―r.
aïŋ―aïŋ―ïŋ―da robotun hangi tarafïŋ―ndaki dokunma algïŋ―layïŋ―cïŋ―sïŋ―nïŋ―n devre diyagramïŋ―nïŋ―n hangi ayaïŋ―ïŋ―na baïŋ―lanacaïŋ―ïŋ―nïŋ― gïŋ―rebileceïŋ―iniz bir
ïŋ―ekil var. ïŋ―ekil aynïŋ― zamanda motorlarïŋ―n nasïŋ―l baïŋ―lanacaïŋ―ïŋ― da gïŋ―stermektedir. Motorlar, +3V hattïŋ― "+" ayaïŋ―ïŋ―na baïŋ―lanïŋ―p toprak
hattïŋ― "-" ayaïŋ―ïŋ―na baïŋ―lanïŋ―rsa robot ileriye doïŋ―ru (ok yïŋ―nïŋ―nde) hareket edecek ïŋ―ekilde kutuplanmalïŋ―dïŋ―r. 1293d'nin ayaklarïŋ― 1y den
4y'ye kadar adlandïŋ―rïŋ―lmïŋ―ïŋ―tïŋ―r.
![[]](../../common/images/article297/robot_connectors.gif)
Yazïŋ―lïŋ―m
Burada fazla detaya girmek istemiyoruz. Ana program linuxrobot.c dosyasïŋ―nda gïŋ―rïŋ―lebilir (makalenin sonundan indirin).
Program, bir C programcïŋ―sïŋ― tarafïŋ―ndan rahatlïŋ―kla anlaïŋ―ïŋ―labilecek aïŋ―ïŋ―klamalarïŋ― iïŋ―eriyor. Ana dïŋ―ngïŋ― ilk ïŋ―nce Mikro kontrol
biriminin analog-dijital ïŋ―eviricisini bir anda ïŋ―evirme modunda 3 kez ïŋ―alïŋ―ïŋ―tïŋ―rarak foto direnïŋ―lerin analog bilgilerini elde eder.
Bundan sonra dokunma algïŋ―layïŋ―cïŋ―larïŋ―na bakar. Eïŋ―er dokunma algïŋ―layïŋ―cïŋ―lardan herhangi biri basïŋ―lmïŋ―ïŋ―sa ïŋ―ïŋ―ïŋ―k algïŋ―layïŋ―cïŋ―larïŋ―ndan
daha ïŋ―nemli hale gelecekler ïŋ―ïŋ―nkïŋ― bu durumda robotun hareketini engelleyen bir ïŋ―ey yoluna ïŋ―ïŋ―kmïŋ―ïŋ― olabilir. Robot, motoru,
basïŋ―lmïŋ―ïŋ― durumdaki dokunma algïŋ―layïŋ―cïŋ―sïŋ―nïŋ―n tersi yïŋ―nde birkaïŋ― milisaniye dïŋ―ndïŋ―recektir. Eïŋ―er dokunma algïŋ―layïŋ―cïŋ―larïŋ―na
basïŋ―lmamïŋ―ïŋ―sa ïŋ―ïŋ―ïŋ―k algïŋ―layïŋ―cïŋ―larïŋ― arasïŋ―nda bir karïŋ―ïŋ―laïŋ―tïŋ―rma yapïŋ―lacak. Bu karïŋ―ïŋ―laïŋ―tïŋ―rma compare_with_tol() fonksiyonun ile
yapïŋ―lïŋ―yor. Bu fonksiyon bir deïŋ―eri diïŋ―er iki tanesinin ortalama deïŋ―eriyle karsïŋ―laïŋ―tïŋ―rmaktadïŋ―r. Gïŋ―rïŋ―ltïŋ―yïŋ― ortadan kaldïŋ―rmak iïŋ―in,
deïŋ―erler arasïŋ―ndaki fark yïŋ―zde 5 in altïŋ―nda ise iki deïŋ―eri eïŋ―it alïŋ―yoruz.
Hangi motorun dïŋ―neceïŋ―ini foto algïŋ―layïŋ―cïŋ―larïŋ―n karsïŋ―laïŋ―tïŋ―rmasïŋ― sonucunda saptïŋ―yoruz. 2 tekerleïŋ―imiz olduïŋ―una gïŋ―re robotu
dïŋ―ndïŋ―rmek iïŋ―in tekerleklerin birini diïŋ―erinden daha hïŋ―zlïŋ― yada ters yïŋ―nlerde hareket ettirebiliriz.
Mikro kontrol birimi ïŋ―lïŋ―ïŋ―mleri ïŋ―ok hïŋ―zlïŋ―, saniyede ïŋ―ok kez, tekrarladïŋ―ïŋ―ïŋ―ndan robotun hareketi, motoru biraz saïŋ―a yada sola
dïŋ―ndïŋ―rmek iïŋ―in motorun birini saniyenin bir kesri kadar durdursak bile, sïŋ―rekli gïŋ―rïŋ―nïŋ―r.
Bir araya getirmek
Elektroniïŋ―i bir araya getirirken testleri aïŋ―amalïŋ― yapmak her zaman iyi bir fikirdir. Bu yolla olasïŋ― hatalarïŋ― en aza indirebilirsiniz.
Linuxrobot yazïŋ―lïŋ―m paketinde 3 farklïŋ― test programïŋ― vardïŋ―r. Ledtest programïŋ― 2 LED'in yanïŋ―p sïŋ―nmesi saïŋ―lar.
Bunu "make ledtestload" komutu ile yïŋ―kleyebilirsiniz. Bu programïŋ―n derlenmesini ve Mikro kontrol birimine yïŋ―klenmesinin saïŋ―lar.
2 LED, program yïŋ―klenir yïŋ―klenmez yanïŋ―p sïŋ―nmeye baïŋ―lamalïŋ―. Bu test baïŋ―arïŋ―lïŋ― olduïŋ―unda mikro kontrol biriminin, osilatïŋ―rïŋ―n ve
yazïŋ―lïŋ―mïŋ― yïŋ―klemek iïŋ―in PC ile kurulan baïŋ―lantïŋ―nïŋ―n ïŋ―alïŋ―ïŋ―tïŋ―ïŋ―ïŋ―ndan emin olabilirsiniz.
Sonraki adïŋ―m, motor test programïŋ―dïŋ―r. Bu test programïŋ― "elektronik lastik top" iïŋ―erir. Bunu "make motortestload" komutu ile
yïŋ―kleyebilirsiniz. Motor test programïŋ― dokunma algïŋ―layïŋ―cïŋ―larïŋ―nïŋ― sïŋ―rekli yoklar ve biri dokunulduïŋ―unda robot dokunulan
algïŋ―layïŋ―cïŋ―dan uzaklaïŋ―mak iïŋ―in hareket eder. Eïŋ―er robota parmaïŋ―ïŋ―nïŋ―zla bir taraftan dokunursanïŋ―z robot ters yïŋ―nde sekecektir.
Diïŋ―er elinizi robotun arkasïŋ―na koyarsanïŋ―z robot iki elinizin arasïŋ―nda lastik bir top gibi sïŋ―rekli sekecektir.
Robot bu testi geïŋ―erse ïŋ―ïŋ―ïŋ―k algïŋ―layïŋ―cïŋ―larïŋ― ile RS232 baïŋ―lantïŋ―sïŋ― dïŋ―ïŋ―ïŋ―nda her ïŋ―ey test edilmiïŋ―tir.
Son test programïŋ― adctes olarak adlandïŋ―rïŋ―lïŋ―r ("make adctestload" ile derleyip yïŋ―kleyin). Program, robotun hatalarïŋ―nïŋ― ayïŋ―klamak iïŋ―in
konmuïŋ― bulunan RS232 baïŋ―lantïŋ―sïŋ―nïŋ― ve 3 foto algïŋ―layïŋ―cïŋ― iïŋ―in analog-dijital ïŋ―eviriciyi (ADC - analog to dgital converter) test eder.
Programïŋ― mikro kontrol birimine yïŋ―kleyin ve PC'nize RS232'yi baïŋ―layïŋ―nïŋ―z. Bundan sonra aïŋ―aïŋ―ïŋ―daki 3 komutu kabukta ïŋ―alïŋ―ïŋ―tïŋ―rïŋ―n:
make ttydevinit
./ttydevinit /dev/ttyS0
cat /dev/ttyS0
Robot periyodik olarak foto algïŋ―layïŋ―cïŋ―lar tarafïŋ―ndan ïŋ―lïŋ―ïŋ―len ïŋ―ïŋ―ïŋ―k ïŋ―iddetinin miktarïŋ―nïŋ― ekrana yazacaktïŋ―r.
Tïŋ―m testler baïŋ―arïŋ― ile tamamlandïŋ―ïŋ―ïŋ―nda son programïŋ― robota "make load" ile yïŋ―kleyebilirsiniz. ïŋ―lk test iïŋ―in en uygun yer ortasïŋ―nda
tek lamba olan bir odadïŋ―r. Robot direkt lambaya doïŋ―ru gitmeli ve orda durmalïŋ―.
Arka tarafïŋ― ïŋ―ïŋ―ïŋ―k kaynaïŋ―ïŋ―na gelecek ïŋ―ekilde yerleïŋ―tirdiïŋ―inizde nasïŋ―l dïŋ―ndïŋ―ïŋ―ïŋ―nïŋ― veya gïŋ―lgeleri nasïŋ―l yok ettiïŋ―ini gïŋ―rmek oldukïŋ―a
eïŋ―lencelidir.
Problemler ve ïŋ―yileïŋ―tirmeler:
Bu robotu kïŋ―ïŋ―ïŋ―k bir deney olarak baïŋ―lattïŋ―k. Kendi kendine karar veren ve PC ile data baïŋ―lantïŋ―sïŋ―na gerek duymadan ilerleyen bir
robot yapmak eïŋ―lenceliydi. Makalenin ilerleyen kïŋ―sïŋ―mlarïŋ―ndan indirebileceïŋ―iniz linuxrobot paketindeki program oldukïŋ―a kïŋ―ïŋ―ïŋ―k
ve basit olmasïŋ―na raïŋ―men istediïŋ―imizi yapïŋ―yor: Robot en aydïŋ―nlïŋ―k yere doïŋ―ru ilerler.
ïŋ―lerideki geliïŋ―tirmeler iïŋ―in baïŋ―langïŋ―ïŋ― noktalarïŋ― kullanïŋ―labilecek bazïŋ― noktalardan bahsetmek istiyoruz:
- Dokunma algïŋ―layïŋ―cïŋ―larïŋ―nïŋ―n oldukïŋ―a geniïŋ― zaman dilimlerinde yoklanmasïŋ― robotun yanïŋ―t verebilirliïŋ―ini sïŋ―nïŋ―rlïŋ―yor.
Bunlar daha sïŋ―k yoklanmalïŋ―dïŋ―r.
- Bir dokunma algïŋ―layïŋ―cïŋ―sïŋ―na temas edilirse bu diïŋ―er her ïŋ―eyden daha ïŋ―nemli duruma gelir ve robot ters yïŋ―nde birkaïŋ― yïŋ―z
milisaniye hareket eder. Bu zaman zarfïŋ―nda bir baïŋ―ka dokunma algïŋ―layïŋ―cïŋ―sïŋ― bir ïŋ―eye dokunursa bu genellikle ihmal edilir.
- Foto algïŋ―layïŋ―cïŋ―larïŋ―n hassaslïŋ―ïŋ―ïŋ― zayïŋ―f ïŋ―ïŋ―ïŋ―kta azalïŋ―yor. Bu, algïŋ―layïŋ―cïŋ―larïŋ―n ïŋ―lïŋ―tïŋ―ïŋ―ïŋ― deïŋ―erlerin arasïŋ―ndaki farkïŋ―n programa
yerleïŋ―tirilmiïŋ― eïŋ―ik dïŋ―zeyinin (%5)altïŋ―na inmesi etkisine yol aïŋ―abilir ve bu durumda robot bïŋ―tïŋ―n algïŋ―layïŋ―cïŋ―larïŋ―n eïŋ―it miktarda
ïŋ―ïŋ―ïŋ―k aldïŋ―ïŋ―ïŋ―nïŋ― dïŋ―ïŋ―ïŋ―nïŋ―r. Bu etkiyi ortadan kaldïŋ―rmak iïŋ―in ADC'den gelen ïŋ―ïŋ―ïŋ―k deïŋ―erleri lineer olmayan bir filtre eïŋ―risiyle ayarlanabilir.
Su anda Linuxrobot programïŋ― oldukïŋ―a kïŋ―ïŋ―ïŋ―k ve basittir, bu yïŋ―zden kolaylïŋ―kla anlayabilir ve geliïŋ―tirebilirsiniz.
Bir 4433 Mikro kontrol biriminin hafïŋ―zasïŋ―nïŋ―n yalnïŋ―zca %50'sine ihtiyaïŋ― duyar bïŋ―ylece daha pek ïŋ―ok ïŋ―ey ekleyebilirsiniz.
Bu robot ile ilgili iyi ïŋ―ey donanïŋ―mïŋ―n su yada bu ïŋ―ekilde geliïŋ―tirilebilir olmasïŋ―dïŋ―r: Temel olarak 2 motor ve mikro kontrol birimine
baïŋ―lïŋ― birkaïŋ― algïŋ―layïŋ―cïŋ―dan ibarettir. Tïŋ―m mantïŋ―k yazïŋ―lïŋ―mïŋ―n iïŋ―indedir. Bu, yazïŋ―lïŋ―mïŋ― deïŋ―iïŋ―tirmekle hemen hemen istediïŋ―iniz her ïŋ―eyi
deïŋ―iïŋ―tirebilmeniz anlamïŋ―na gelir.
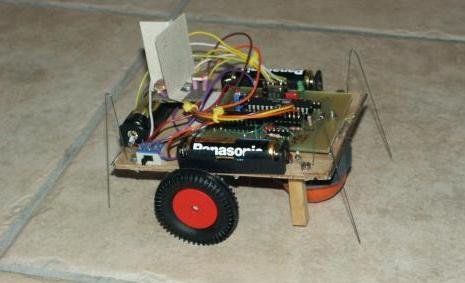
Test durumundaki robotun bir resmi vardïŋ―r. Etrafa kaïŋ―masïŋ―n diye altïŋ―na birkaïŋ― post-it bloïŋ―u yerleïŋ―tirdik. RS232 baïŋ―lantïŋ―sïŋ― hata
ayïŋ―klamak amacïŋ― ile yapïŋ―lmïŋ―ïŋ―tïŋ―r:
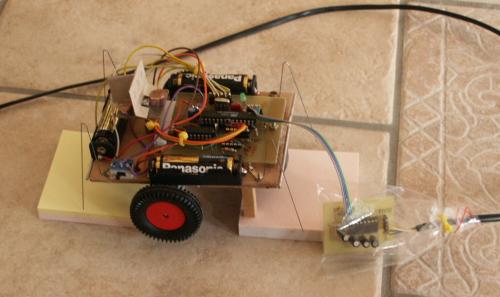
... son olarak ïŋ―ïŋ―ïŋ―ïŋ―ïŋ― arayan robot ...:
Referanslar
Bu yazïŋ― iïŋ―in gïŋ―rïŋ―ïŋ― bildiriminde bulunabilirsiniz
Her yazïŋ― kendi gïŋ―rïŋ―ïŋ― bildirim sayfasïŋ―na sahiptir. Bu sayfaya yorumlarïŋ―nïŋ―zïŋ― yazabilir ve diïŋ―er okuyucularïŋ―n yorumlarïŋ―na bakabilirsiniz.
<--, Bu sayïŋ―nïŋ―n ana sayfasïŋ―na gider
2003-11-07, generated by lfparser version 2.43
![[photo sensors]](../../common/images/article297/lightsensors.jpg)
![[position of the photo sensors]](../../common/images/article297/sensors.gif)