![[Photo des Auteurs]](../../common/images/KatjaAndGuido.jpg)
par Katja et Guido Socher
<katja(at)linuxfocus.org, guido(at)linuxfocus.org>
L´auteur:
Katja est l'éditrice allemande de LinuxFocus. Elle aime Tux,
l'infographie, les films & la photographie et la mer. Sa page personnelle est
là. Guido est fan de Linux depuis la première heure parce que ce système
vous donne le choix et la liberté. Cela permet de choisir et développer
des solutions en accord avec ses besoins.
Traduit en Fran�ais par:
John Perr <johnperr(at)linuxfocus.org>
Sommaire:
|
Construire un robot chercheur de Lumière
![[Illustration]](../../common/images/article297/robot.jpg)
Résumé:
Dans cet article, nous décrivons comment construire un robot autonome,
avec un microcontrolleur, qui essaie de se déplacer vers le point le plus
lumineux.
_________________ _________________ _________________
|
Introduction
Il y deux ans, nous avons décrit dans LinuxFocus un robot marcheur
contrôlé par Linux. Il avait une conception très spéciale car il
marchait sur ses pattes sans l'aide de moteurs conventionnels.
Ce fut un aspect très intéressant du robot. Toutefois, il était très lent,
demandait de fort courants et nécessitait des composants spécifiques
ainsi qu'un certain doigté pour sa construction.
La conception de notre nouveau robot est très différente. Il est
bon marché et vous pourrez le construire à partir de composants facilement
disponibles partout dans le monde. C'est un robot contrôlé par un
microcontrolleur AVR. Comme il est autonome (c'est à dire non contrôlé
par une personne) nous l'avons programmé pour qu'il se dirige vers la
source de lumière la plus brillante de la pièce.
La mécanique
![[Moteur conrad]](../../common/images/article297/297_conrad.jpg)
Le petit moto-réducteur de chez Conrad
|
![[servo-moteur]](../../common/images/article297/297_servo.jpg)
Un servomoteur standard modifié pour fonctionner comme un moteur.
Il s'agit sûrement de la meilleur solution, mais l'idée ne nous est venue
qu'après la construction du robot
|
Le robot n'a que deux roues entraînées par deux moteurs indépendants.
La troisième roue est une balle de ping-pong. Cette configuration
permet au robot de tourner sur place. Les roues en caoutchouc provienne
d'un jouet mais vous n'aurez pas à cassez les vôtres. Le couvercle d'un
pot à confiture, pourvu d'un élastique constitue une roue très acceptable.
Il est évident qu'un robot autonome doit pouvoir fonctionner à partir
de piles. Étant donné que le microcontrolleur fonctionne avec une tension
de 4,5 à 5 Volts, il doit en être de même avec les moteurs. Il doivent aussi avoir
une consommation qui permette d'avoir des piles et un circuit de
contrôle de taille raisonnable. Nous utilisons pour cela un circuit intégré
dédié au contrôle des moteurs, le l293d. Il peut supporter des charges
jusqu'à 0,5A. Les moteurs devront par conséquent avoir besoin de moins de 0,5A
dans le pire des cas.
Nous avons utilisé deux petit moto-réducteurs de chez Conrad (www.conrad.fr,
référence 242802) mais vous pouvez utiliser n'importe quel petit moto-réducteur.
Nous pensons que le meilleur solution aurait été d'utiliser des servomoteur
de modélisme comme ceux montés sur les bateaux, les voitures ou les avions.
Normalement, ces servomoteurs sont limités angulairement mais cela peut
être corrigé en ouvrant la boite et en enlevant la butée, le potentiomètre et
l'électronique. C'est un parfait petit moteur puissant et facile à trouver.
![[moteur sur planchette 1]](../../common/images/article297/297_mecanics1.jpg)
Pour construire le robot, monter les moteurs sous une planchette de bois
(12cm x 9cm) et placer les quasiment au milieu afin que la charge repose sur
les deux axes. La troisième roue, la balle de ping-pong, ne devra supporter
qu'un faible partie du poids du robot afin qu'elle glisse facilement dans
son logement (voir les dessins).
![[moteur sur planchette 2]](../../common/images/article297/297_mecanics2.jpg)
Le logement de la balle de ping-pong est réalisé à partir du couvercle
d'une petite bouteille en plastique qui se trouve avoir la bonne taille.
![[Boîte de pilules]](../../common/images/article297/297_mecanics3.jpg)
L'alimentation est assurée par trois piles de taille AAA. Les positions
des trois supports sont indiquées ci-dessous. Les piles sont plutôt
lourdes, c'est pourquoi il faut faire attention à placer la majorité du poids
sur les roues et un peu sur la balle de ping-pong. Un interrupteur marche-arrêt
peut être placé sur le coté.
![[position des piles]](../../common/images/article297/batteries.gif)
Les capteurs
Notre robot a deux types de capteurs:
- contact: le robot sait s'il a rencontré un objet
- lumière: le robot peut chercher le point le plus lumineux de la pièce
Les capteurs de contact sont de simple interrupteurs faits de tige d'acier. Elles sont pliées
comme indiqué ci-dessous:
![[Fil d'acier]](../../common/images/article297/steelwire.jpg)
Il y a quatre capteurs de contact, montés avec des vis sur les coins de la planchette.
Quand le robot rencontre un objet, la tige d'acier (2, figure ci-dessous) touche
le second conducteur sur la planche (3) et cela ferme un circuit.
Afin d'éviter de tordre les fils d'acier quand la balle de ping-pong n'est pas dans son logement,
nous avons ajouté un support en bois (1) sous le châssis. Il doit être 5 mm au dessus du sol quand la balle
de ping pong est dans son logement.
Les tiges d'acier des contacts doivent avoir une garde de 5-7mm au dessus du sol.
![[Capteurs de contact]](../../common/images/article297/touchsensor.jpg)
Les capteurs de lumière sont 3 photo résistances entre lesquelles
nous avons placé des masques en carton comme le montre la figure
ci-dessous. Ces masques créent des ombres sur les résistances
quand la lumière vient de coté. Au cas où la lumière vient
exactement du dessus, les trois capteurs recevront la même
quantité de lumière. La comparaison des valeurs des trois résistances
permettra de déterminer la direction à prendre.
Vous pouvez souder les trois résistances sur un petit morceau de
circuit imprimé d'expérimentation (ceux avec beaucoup de trous) et fixer l'ensemble
au robot avec une unique vis.
La façon de connecter les capteurs et les moteurs au circuit imprimé du
microcontrolleur sera expliquée plus tard. Maintenant que la partie mécanique est réalisée,
jetons un oeil au cerveau du robot.
Le Circuit
Nous utilisons un microcontrolleur AT90S4433 comme cerveau de notre robot
mais ce cerveau ne peut délivrer suffisamment de puissance pour faire
marcher les moteurs. C'est là que le circuit de puissance L293D intervient.
Il contient quatre amplificateurs digitaux munis de diodes de protection
contre les surtensions dues aux bobinages des moteurs. Cela permet aussi
de piloter le moteur dans un sens ou dans l'autre.
Un des moteur est relié entre les sorties 1 et 2 et l'autre entre les sorties 3 et 4.
La broche "enable" permet de contrôler la vitesse des moteurs en changeant
la longueur des impulsions envoyées à cette broche.
Le reste du circuit est très simple: Nous utilisons encore le microcontrolleur
Amtel AT90S4433. Nous avons déjà utilisé ce microcontrolleur dans des articles
précédents de LinuxFocus. Ses entrées analogiques peuvent être utilisées pour
mesurer la quantité de lumière perçue par les photo résistances et les entrées
digitales permettront de connecter les détecteurs de contact comme montré ci-dessous.
Les informations détaillées sur le microcontrolleur se trouvent dans l'
article de Mars 2002 : Programmer
le Microcontrolleur AVR avec GCC du même auteur.
Le circuit est alimenté en 4.5V. Trois piles de taille AAA batteries sont
par conséquent suffisantes pour le fonctionnement du robot.
Le circuit de notre robot autonome devrait maintenant être prêt. Toutefois,
se pose la question de savoir quoi faire si le robot ne fonctionne pas
comme prévu à cause du logiciel. Rien n'est accessible, ni les valeurs des
photo-résistances ni les décisions prises par le robot. Il nous faut une sorte
d'écran ou d'affichage pour comprendre ce que fait le robot. L'interface série
RS232 est bien adaptée à ce besoin car il est possible d'y afficher des contenus
de variables et même de communiquer avec le robot. On peut par conséquent
implanter le max232 et les autres composants nécessaires à la liaison série sur
une platine séparée et la connecter à la demande:
Un lien donné en fin de cet article permet de télé-charger le circuit complet au format Eagle,
avec le dessin du circuit imprimé et l'implantation des composants ainsi que
le logiciel du robot. Nous ne décrirons pas l'implantation des composants ici, elle est
visible avec Eagle. Le circuit est suffisamment petit pour se loger entre les piles.
Le dessin ci-dessous montre le brochage des capteurs de contact ainsi que comment
connecter les moteurs. La polarité des moteur est choisie de telle sorte que le robot avance
(dans le sens de la flèche) si +3V sont appliqués à la broche "+" et la masse à la
broche "-". 1y à 4y sont les noms des broches du l293d.
![[Connexions]](../../common/images/article297/robot_connectors.gif)
Le Logiciel
Nous n'entrerons pas dans les détails ici. Le programme principal se trouve dans
le fichier linuxrobot.c (Télé-chargez le à la fin de l'article).
Il y a beaucoup de commentaires dans le programme ce qui devrait en rendre la lecture
facile pour un programmeur C. La boucle principale mesure d'abord
les valeurs des photo résistances en activant 3 fois le convertisseur
analogique-digital interne du microcontrolleur en mode "single shot".
Les capteurs de contact sont ensuite testés et si l'un d'eux est actif, alors
il a priorité sur les capteurs de lumière car le robot à probablement heurté
un obstacle. Le moteur opposé au détecteur sera alors activé quelques millisecondes.
Si aucun détecteur de contact n'est actif, alors les photo résistances sont
comparées entre elles. La comparaison se fait dans la fonction
compare_with_tol(). Pour éviter les perturbations dues au bruit, deux valeurs
sont dites égales si leur différence est inférieure à 5 pour cent.
Selon les résultats de la comparaison des photo résistances, le choix du
moteur à faire tourner est fait. Comme il n'y a que deux roues sur notre robot,
il peut tourner sur place en faisant tourner une des roues plus vite ou même
en faisant tourner les deux en sens inverse. La mesure étant effectuée
plusieurs fois par secondes, le mouvement du robot semble continue
même si nous arrêtons un moteur une fraction de seconde afin de tourner un
peu à droite ou à gauche.
Montage final
En montant l'électronique, c'est toujours une bonne idée de procéder
par étapes. Ceci permet de mieux cerner les éventuels défauts.
Il y a trois programmes de test différents inclus dans le paquetage
logiciel du robot.
Le programme ledtest fait clignoter les deux leds. Il se charge avec la commande
"make ledtestload". Ceci compilera le programme et le chargera dans le microcontrolleur.
Les deux leds doivent commencer à clignoter immédiatement après le chargement du programme.
Une fois ce test réussi vous êtes certain que le microcontrolleur avec son oscillateur
et les connexions de chargement depuis le PC sont fonctionnels.
Viens ensuite le programme de test du moteur. Il réalise une "balle en caoutchouc électronique"
et se charge avec la commande "make motortestload". Le programme motortest
vérifie les les capteurs de contact en permanence et déplace le robot
à l'opposé de tout capteur actif. En touchant le robot avec une main d'un coté
il rebondira. En mettant la deuxième main derrière le robot il rebondira d'avant en arrière
entre vos deux mains comme une balle de caoutchouc. Si le robot réussi cet essai
alors tout aura été vérifié excepté les capteurs de lumière et la liaison RS232.
Viens ensuite le programme d'essai final appelé adctest (compiler et charger le avec
make adctestload). Le programme teste la connexion RS232 qui sert à
déverminer le robot et à tester les 3 photo résistances. Chargez le programme
dans le microcontrolleur et connectez l'adaptateur RS232 à votre PC. Lancer ensuite les
3 commandes suivante dans un terminal:
make ttydevinit
./ttydevinit /dev/ttyS0
cat /dev/ttyS0
Le robot devrait périodiquement afficher les valeurs des
intensité lumineuses qu'il a mesuré avec les capteurs photo sensibles.
Une fois tous les essais réussis, vous pouvez charger le programme final dans le robot
avec la commande "make load".
La meilleure aire pour les premiers essais est une pièce avec
juste une lampe en son centre. Le robot devrait aller droit dans la direction de
la lampe et s'arrêter là.
Il est amusant de voir comment il se retourne si vous le poser sur le sol
le dos à la lumière ou comment il évite les ombres.
Problèmes et améliorations
Nous avons commencé ce robot à titre d'essai. ce fut amusant de construire
un robot autonome, capable de prendre seul des décisions et qui n'a pas
de connexion au PC. Le programme inclus dans le paquetage que vous
pouvez télé-charger à la fin de cet article est encore petit et simple
mais fait ce que nous lui avons demandé: Le robot court vers
le point le plus lumineux.
Voici quelques idées de développements complémentaires:
- Les capteurs de contact ne sont vérifiés qu'a de larges intervals
(quelques millisecondes) ce qui limite les capacité de réponse du robot.
Ils devrait être vérifié plus souvent.
- Si un des capteurs de contact est actif, alors il devient prioritaire
sur tout le reste et le robot se déplace dans la direction opposée
pendant quelques millisecondes. Si un capteur différent est activé
pendant ce temps, il est ignoré.
- La sensibilité des photo-résistances décroît avec la luminosité.
Ceci peut conduire le programme à croire que tout les capteurs
reçoivent la même quantité de lumière car le seuil de 5% est
compilé dans le programme. Les valeurs de lumière issues du
Convertisseur Analogique Numérique pourraient être ajustées avec
un filtre non linéaire pour compenser ces effets.
Dans sa version actuelle le programme du robot linux est suffisamment petit et
simple pour être compris et étendu. Il n'utilise que 50% de la mémoire disponible
du microcontrolleur 4433, ce qui laisse beaucoup de place pour des extensions.
Un point positif de ce robot est son matériel qui est générique:
Il est constitué de deux moteurs et quelques capteurs attachés au
microcontrolleur. Toute la logique est logicielle. Cela signifie
que tout peut être changé à souhait.
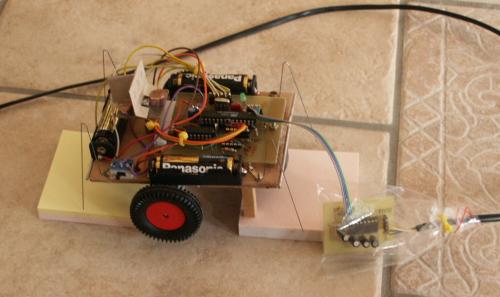
Voici une photo du robot en position d'essai. Nous avons juste mis un bloc de
post-it dessous afin d'éviter qu'il ne se sauve. La ligne RS232 est connectée
pour des besoins de déboguage.
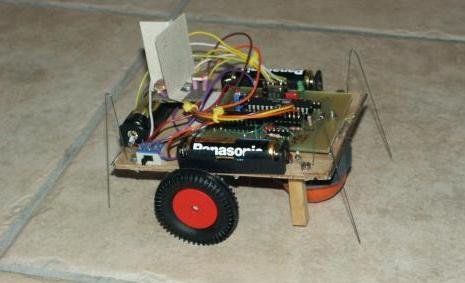
... et le robot robot fini cherchant la lumière....:
Références
Discussion sur cet article
Chaque article possède sa page de discussion. Vous pouvez y soumettre un commentaire ou lire ceux d´autres lecteurs:
<--, retour au sommaire de ce num�ro
2003-07-26, generated by lfparser version 2.42
![[Capteurs photo-sensibles]](../../common/images/article297/lightsensors.jpg)
![[position des capteurs photo-sensibles]](../../common/images/article297/sensors.gif)